

 联系我们
联系我们

动作模式
软件缓冲器功能包含,(1)各个轴方向,(2)基础坐标方向,(3)工具坐标方向 3 个动作模式,可以任意设定对应外力的规避动作的方向。


软件缓冲器功能中的直线动作
基本上来说,软件缓冲器功能就是对应外力做规避动作的功能,不作用外力的话机器人保持在原位置静止。但是,对于基础/工具模式下的软件缓冲器来说,执行 SAVDRAW 命令、和 SATVDRAW 命令时,即使不作用外力的话,也可使机器人进行直线的动作。关于机器人朝基础坐标 Y 方向的动作,如下例做出说明

用软件缓冲器功能使机器人作业时,有必要讨论外力作用于哪个方向,以及此时的规避动作应该是哪个轴做,应如何动作。用软件缓冲器功能使进行规避动作时,由于至少需要克服机械静摩擦的力,所以向机器人施加外力时,需要成为有效的轴转矩那样的工具姿态。特别是使用基础坐标轴方向或工具坐标轴方向的软件缓冲器功能,施加外力的时候,需要对手腕轴施加准确的外力扭矩,使其做出规避动作。

位置示教方法
软件缓冲器功能通过 AS 语言程序使用, 其程序流程,如下所示,大致分为三大块。
(1)条件设定部 SADEGREE
软件缓冲器功能有效范围的指定
SALENGTH
SAGRAV ------------ 重力补偿的设定
SAGAIN ------------ 各轴柔度的设定
SAXYZ or SATXYZ---- 移动方向的指定(没有这两个命令时各轴方向)
(2)功能开始 SASTART
(3)功能结束 SAEND
(1)将条件设定部记述为子程序,(2)将功能开始和(3)功能结束记述为作业程序的话,即成为便于管理的程序。

使用条件的设定
1.功能有效范围(SADEGREE、SALENGTH 命令)
从软件缓冲器功能开始的点开始的功能有效范围用角度(SADEGREE 命令)和距离(SALENGTH命令)来指定。在软件缓冲器功能动作中,机器人到达这个范围界限时,机器人返回到通常的动作。请在编制机器人程序时,使用这两个命令设定功能有效范围。另外,在设定功能有效范围时,请限于可应用的必需的***小限度。
2.重力补偿的设定(SAGRAV 命令)
软件缓冲器功能中的重力补偿用 SAGRAV 命令来设定条件。不过,因本设定的误差和计算误差等造成不能避免软件缓冲器中的偏移时,需要重新调整用 SAGAIN 命令进行的增益设定。为了避免这样的不利情况,建议将机器人的规避动作的方向设为水平方向,取消重力的影响这样来制订应用计划。
3.柔度的调整(SAGAIN 命令)
软件缓冲器功能中的顺从性(伺服的灵活性)用 SAGAIN 命令调整。设定范围在 0~100[%],增益的设定越小越可用小的外力进行规避动作。该设定值越小,伺服就变得越灵活,但外力开放时的残留偏差和惯性的影响下有时会出现偏移的动作。在这种情况下,请重新增大增益设定。
4.移动方向的设定(SAXYZ、SATXYZ 命令)
软件缓冲器功能中的移动方向可用各个轴的方向,基础坐标轴方向,工具坐标轴方向之一来指定。发布 SAXYZ 命令的话为基础坐标轴,发布 SATXYZ 命令的话为工具坐标轴,没有发布 SAXYZ、 STXYZ 命令时就是各个轴的方向。但,因功能性质的关系,不能保证轨迹的精度,对此请给以了解。
5.偏差异常检查的有无设定(SAENVCHKON、SAENVCHKOFF 命令)
设定软件缓冲器功能中的偏差异常检查的有无。发布 SAENVCHKON 命令的话, 偏差异常检查为有效,发布 SAENVCHKOFF 命令的话,偏差异常检查为无效。
调 整 顺序
使用软件缓冲器功能使机器人动作,需要与机器人的姿势,动作方向相符的正确的各个轴的增益和重力补偿参数。调整软件缓冲器功能请按如下步骤进行

程序例
SAGAIN 10,80,80,5,50,10
SAGRAV 30, 0, 0,350
SATXYZ 1, 0, 0, 0, 0, 0
SASTART
:
SAEND
1.假定各轴的增益和重力补偿参数
(1)各轴的增益根据机器人的姿势,动作的方向做出暂时决定。设定要执行 SAGAIN 命令。
[调整方法]
1)从重力方向受力轴的增益尽量调高些。(50 %以上)
2)按照外力进行规避动作时,旋转轴的增益要尽量减低。
在图中,从重力方向受力的轴是 JT2,JT3。再有,工件被推出时进行规避动作的轴是 JT1,JT4,JT6,所以使用 SAGAIN 10,80,80,10,50,10。
(2)重力补偿参数的假定,要根据机械手和工件的质量和重心位置的概算值来设定。设定要执行 SAGRAV 命令。程序例中使用 SAGRAV 30, 0, 0, 350。

2.用工具或基础的全方向模式实行软件缓冲器
用工具坐标或基础坐标的全方向模式实行软件缓冲器。在图 2.2 的适用例中,程序例的SATXYZ 暂时设为 1,1,1,1,1,1。
3.机器人可否几乎静止
确认机器人在软件缓冲器开始的位置可否几乎静止。在实际操作中没进行朝重力方向的软件缓冲器的动作时,不必进行***的调整。
在图 2.2 的应用例中,因以 SATXYZ 1,0,0,0,0,0 使软件缓冲器动作,从而不产生向重力方向(工具 Z 方向)的软件缓冲器动作,所以,不必进行***的调整。
4.施加规定以外的外力
施加规定的外力。在图 2.2 的应用例中,实际上由工件推出装置推出工件。
5.能否按照外力进行规避动作
确认按照外力规避动作能否顺利地进行。
6.各个轴增益的调整
进行各个轴的增益的微调。
(1) 机器人不能静止时 → 适当增大偏差大的轴(常旋转的轴)的增益。
(2) 按规定的外力不能进行规避动作时 → 各个轴的增益高,所以不能进行规避动作。在这时,适当减小偏差大的轴的增益。
7.重力补偿参数的调整
实际地操作软件缓冲器的功能,进行重力补偿参数的微调。调整时,没有向软件缓冲器功能动作中施加外力的话,就在该位置寻找可几乎静止的参数。设定使用 SAGRAV 命令。
[调整方法]
(1) 臂杆向重力方向移动(下降)时,加大质量参数。
(因为参数比实际的质量小)
(2) 臂杆朝与重力方向相反的方向移动(上升)时,减小质量参数。
(因为参数比实际的质量大)
(3) 重心位置的参数的调整随机器人作业姿势的变化而不同,但一般来说,离法兰面的距离越远,对载荷的轴来说,重力补偿的效果越明显。
注意事项/限制事项
1.如下的情况本功能无效。
(1) 示教/检查模式时
(2) 马达电源切断出现故障时
(3) 按下紧急停止,马达电源切断时
(4) 用 EXECUTE 命令,从头开始重新操作程序时
(5) 程序选择后,循环开始时
(6) 打开控制电源时
2.程序暂时停止后再启动时,服从当时的设定状态。
但,在前述的条件下本功能无效时,则功能不再启动,而执行以后的程序。
3.在未实行本功能进行中的动作命令式(JMOVE、LMOVE 等),会出现故障报警。

4.本功能的外部轴的应用,仅限定在使用 KHI 放大器时。
AS 语言解说
SAGAIN 第 1 轴增益,第 2 轴增益,第 3 轴增益,第 4 轴增益,第 5 轴增益,第 6轴增益,第 7 轴增益,第 8 轴增益,第 9 轴增益
功能
在软件缓冲器功能有效时设定各轴的增益。

SAXYZ X 方向设定,Y 方向设定,Z 方向设定,RX 方向设定,RY 方向设定,RZ 方向设定
功能
在软件缓冲器功能有效情况下,被施加外力时,设定动作的方向为沿基础坐标系的轴方向及围绕此轴的回转方向

SATXYZ X 方向设定,Y 方向设定,Z 方向设定,RX 方向设定,RY 方向设定,RZ 方向设定
功能
将软件缓冲器功能有效时施加外力时的动作方向设定为工具坐标系的轴方向及围绕轴的回转方向。

SADEGREE 第 1 轴角度,第 2 轴角度,第 3 轴角度,第 4 轴角度,第 5 轴角度,6 轴角度,第 7 轴角度,第 8 轴角度,第 9 轴角度
功能
通过各轴角度设定软件缓冲器功能的有效范围。

SALENGTH X+,X-,Y+,Y-,Z+,Z-,RX+,RX-,RY+,RY-,RZ+,RZ-
功能
通过基础/工具坐标系设定软件缓冲器功能的有效范围。
图片
SAGRAV 负荷质量,重心位置 X,重心位置 Y,重心位置 Z
功能
设定软件缓冲器功能有效时的重力补偿值

SAVDRAW X 方向移动速度,Y 方向移动速度, Z 方向移动速度,RX 方向移动速度,RY 方向移动速度,RZ 方向移动速度
功能
在软件缓冲器动作中、执行按基础坐标指定的动作


SAENVCHKOFF
SAENVCHON
功能
控制偏差异常的检查。

压铸成形品的取出实例程序:
压铸成形品(以下称工件)从压铸机通过排出装置强制排出。通常、工件的取出作业由机器人来执行时、使用装配了浮动机构的机械手(以下称专用工具)、但因为如果具备了软件缓冲器功能后、机器人自身可以向工件的排出方向进行规避动作、所以没有浮动机构的机械手也可以进行本操作

机器人的动作
从压铸成形机中取出工件的动作概略如下图所示。


工件嵌合
要使机器人将抓取工件嵌合到固定位置的工件上时、通常需要使用装置了浮动机构的机械手(以下称专用工具)、但是具有软件缓冲器功能的机器人自己可以在抓取过程当中进行仿形动作、因此没有浮动机构的机械手也可以完成本动作。

机器人的动作
机器人将抓取的工件嵌合到固定工件时的动作大致如下图所示。

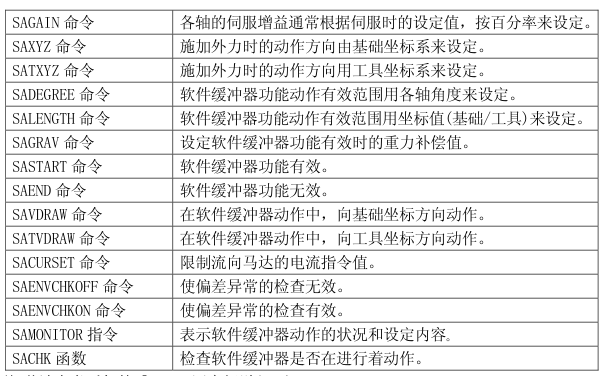
软件缓冲器功能 AS 语言一览
了解更多川崎机器人
文章来源网络,如有侵权请联系删除
- 下一篇:焊接型机器人定期检查四大部分分析——川崎机器人
- 上一篇:川崎机器人的编程常用方法